・直動と回転機構を一本化、コンパクト
・位置制御と荷重制御のシームレスな切り替えによる生産性向上
・繊細な押し当て制御
技術情報
エアサーボステージ
真空エアサーボステージを支える技術

エアサーボ技術

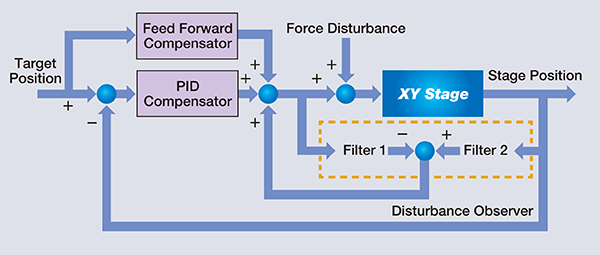
エアステージは3次遅れ系でモデル化できるため、PDD2制御系を用い制御しています。そのため、位置計測値信号より速度・加速度信号を生成し、位置・速度・加速度信号による多重フィードバックループを構成しています。また、逆モデルにより生成されたフィードフォワード補償を加え追従性を向上しています。
ケーブルキャリアなどの外乱を補償する外乱オブザーバを採用し高精度な位置決めを実現しており、さらに空気圧システム特有の非線形要素によるモデル化誤差などを補償するための線形化補償を適用しています。
Yaw制御
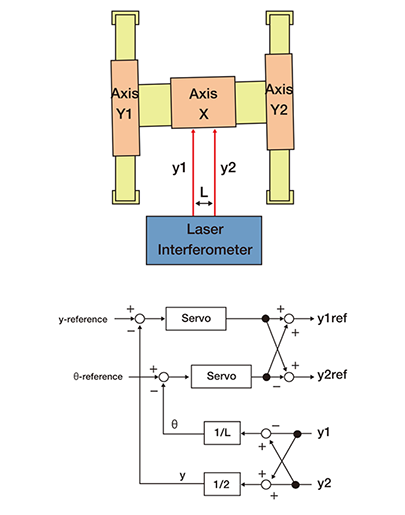
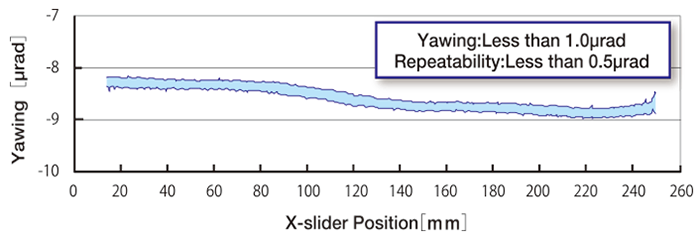
2軸のアクチュエータを駆動しYaw姿勢制御を行っています。Yaw角は一定距離空いた軸の位置検出値から算出して、動作時のYaw姿勢制御を実現しています。真空下における補償の有効性については、Yaw角のずれは1[μrad]、再現性は0.5[μrad]以下の実力があります。
外乱オブザーバ
ケーブルテンションやフリクション等による外乱要素を排除するための制御技術で、当社独自の制御アルゴリズムを採用しています。これにより追従精度を向上し、加速時の外乱振動や、ケーブル負荷(バネ負荷)などの外乱力を補償しています。
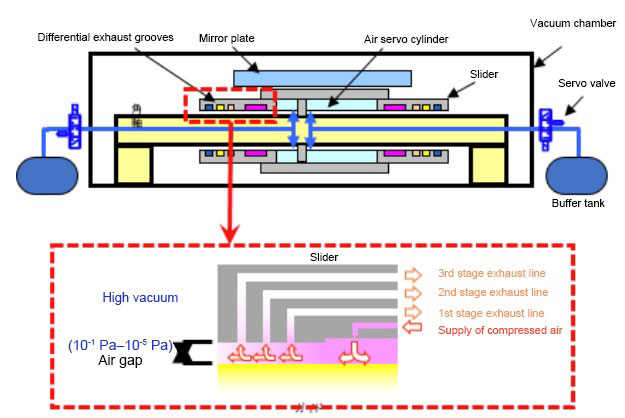
エアベアリング及び三段排気システム
スライダは各面に設けられたエアベアリングを用いて浮上するため、完全非接触動作となり、高精度で再現性の高い動作を可能としています。三段排気システムを採用することで、エアベアリングに供給される空気はスライダ内面の差動排気溝からドライポンプを介して排出し、最終的にはスライダ端部の圧力を中真空程度まで減圧でき、真空チャンバ内の圧力を高真空に維持し、真空化での完全非接触アクチュエータを実現しています。
Yaw制御

2軸のアクチュエータを駆動しYaw姿勢制御を行っています。Yaw角は一定距離空いた軸の位置検出値から算出して、動作時のYaw姿勢制御を実現しています。真空下における補償の有効性については、Yaw角のずれは1[μrad]、再現性は0.5[μrad]以下の実力があります。
